通过提升汽车激光雷达应用的探测和识别能力,增强未来移动出行的安全保障
索尼半导体解决方案公司今天宣布即将推出行业首创*1的直接飞行时间(dToF)堆叠式SPAD(单光子雪崩二极管)深度传感器IMX459,可用于汽车激光雷达。
*1:作为应用于汽车激光雷达的堆叠式SPAD深度传感器,截至2021年9月6日发稿时间。
该产品将尺寸仅为10平方微米的SPAD (单光子雪崩二极管)像素*2和测距处理电路封装在单个芯片上,形成了紧凑的1/2.9型外形尺寸,可进行高精度、高速度的距离测量。
*2:SPAD是一种像素结构,可利用雪崩倍增技术,将单个入射光子的电子放大,从而形成雪崩式叠加。
高级驾驶辅助系统(ADAS)和自动驾驶(AD)的普及对汽车激光雷达的探测和识别能力有了更高的要求,此款新型传感器可提升激光雷达的表现,从而有助于实现安全、可靠的未来移动出行。

*3:基于图像传感器的有效像素测定方法。
除了车载摄像头和毫米波雷达等传感设备,激光雷达作为一种高精度探测和识别道路状况以及汽车和行人等物体位置和形状的手段,正变得越来越重要。同时,激光雷达进一步发展并深入市场仍然需要克服一些技术障碍,包括需要进一步提高测距性能;不受使用环境和条件限制,始终实现更高的安全性和可靠性;以及向固态化*4设计转变来实现小型化和更低的成本。为应对这些挑战,各项举措都在推进当中。
*4:使用半导体技术实现无机械移动部件的电子元件和设备。
在用于激光雷达测距的诸多方法之中,SPAD像素用作dToF传感器中的一种探测元素,它根据光源发射的光被物体反射后返回到传感器的飞行时间(时间差),来测量到物体的距离。索尼利用在CMOS图像传感器开发过程中创造的背照式像素结构、堆叠结构和Cu-Cu连接*5等技术,成功地构建了一种将SPAD像素和测距处理电路封装在单个芯片的独特元器件结构。这种设计令微小至10平方微米的像素尺寸得以实现,在小型化的同时在1/2.9型尺寸规格上达到约十万有效像素的高分辨率,还能增强光子探测效率和提升响应能力,以每15厘米作为一个单位范围从远距离到近距离进行高速度、高精度的距离测量。该产品符合汽车应用的功能安全标准,有助于提高激光雷达的可靠性,单芯片结构有助于实现更小型、低成本的激光雷达。
*5:在堆叠像素部分(顶部芯片)和逻辑电路(底部芯片)时通过连接的Cu(铜)焊盘实现电气连接的技术。与通过插入像素区域周围的电极实现连接的硅通孔 (TSV) 布线相比,这种方法提供了更多的设计自由度、提高了生产效率、允许更紧凑的尺寸并提高了性能。
主要特点:
得益于10平方微米SPAD像素和测距处理电路的堆叠式结构,可实现高速度、高精度的测距性能
该传感器采用堆叠式结构,背照式SPAD像素芯片(上)和搭载测距处理电路的逻辑芯片(下)之间通过Cu-Cu连接实现各个像素的导通。这样的结构允许将电路放置在像素芯片底部,保持高开口率*6,同时实现10平方微米的小像素尺寸。传感器还采用表面不规则的光入射面来折射入射光,从而提高吸收率。这些特点使汽车激光雷达光源常用的905纳米波长达到24%的光子探测效率。例如,可以实现以高分辨率和距离分辨率探测到反射率低的远处物体。此外,电路部分包含一个有源充电电路,由Cu-Cu连接各个像素,令单个光子在正常工作时的响应速度达到约6纳秒*7。
*6:从光入射侧看每个像素的开口部分(除遮光部分以外的部分)的比率
*7:在85°C的温度环境中
这种独特的堆叠结构能够以15厘米为单位范围从远距离到近距离进行高速度、高精度的距离测量,从而有助于提高汽车激光雷达的探测和识别性能。

SPAD ToF深度传感器的堆叠式结构(顶部:SPAD像素,底部:测距处理电路)
成像示例(点云)
符合汽车应用功能安全标准,有助于提高激光雷达的可靠性
该产品经调试认证,符合AEC-Q100(Grade 2)vwin网站 元件可靠性测试的相关要求。索尼还推出了符合ISO 26262汽车功能安全标准的开发流程,支持功能安全要求级别ASIL-B(D),包括故障探测、通知和控制等功能。以上举措将有助于提高激光雷达的可靠性。
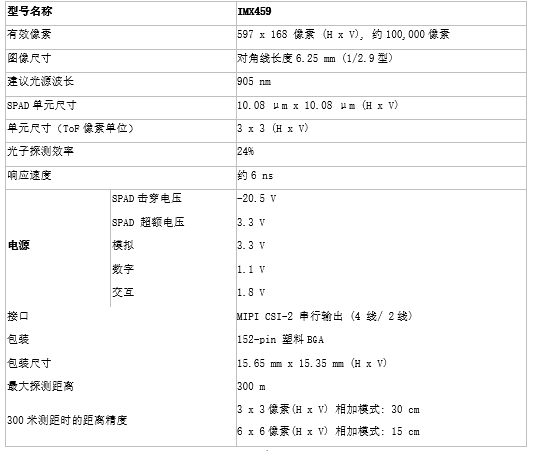
关键参数:
机械扫描激光雷达参考设计
索尼还开发了搭载这款新传感器的机械扫描*8激光雷达参考设计,现已提供给客户和合作伙伴。提供设计将帮助客户和合作伙伴在激光雷达开发过程中节省工时,并通过优化元器件选择来降低成本。
*8:一种通过高速旋转多面镜对从激光二极管发射的激光进行水平扫描的方法。

机械扫描激光雷达参考设计